
BELGM50A uses laser gyro and quartz flexible accelerometer as core sensors, combined with strapdown technology, with multiple working modes, suitable for small and medium-sized unmanned surface vessels (USV) and autonomous underwater vehicles (AUV). Its high stability and reliability ensure accurate navigation in complex environments and meet the needs of modern marine operations and detection.
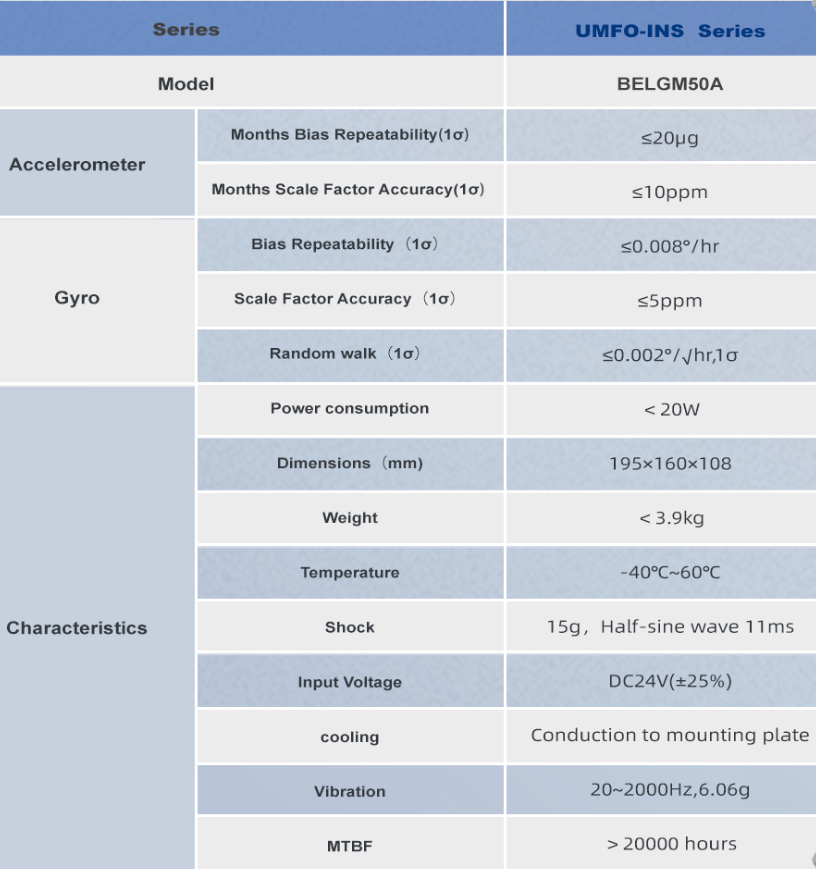
| Model | BELGM50A | ||||
| Accelerometer | Months Bias Repeatability(1σ) | ≤20μg |
Position accuracy |
Pure inertia | ≤0.8nm/1h |
| Months Scale Factor Accuracy(1σ) | ≤10ppm | Inertia/DVL Combination | ≤0.4%D | ||
| Gyro | Bias Repeatability(1σ) | ≤0.008°/hr |
AHRS Applications Performance |
Heading Accuracy | ≤0.05°sec(L) |
| Scale Factor Accuracy(1σ) | ≤5ppm | Pitch & Roll Accuracy | ≤0.02° | ||
| Random walk(1σ) | ≤0.002°/√hr,1σ | Characteristics | Power consumption | <20W | |
| Features | Angular Rate | ≥±400°/sec | Dimensions(mm) | 195×160×108 | |
| Angular Acceleration | 100000°/sec² | Weight | <3.9kg | ||
| Acceleration | >25g | Temperature | -40℃~60℃ | ||
| Angular Attitude | Any Orientation | Shock | 15g,Half-sine wave 11ms | ||
| Speed accuracy | ≤1.5kn | Input Voltage | DC24V(±25%) | ||
| Startup time | ≤10sec | cooling | Conduction to mounting plate | ||
| Input/output | 3 RS422 full-duplex serial ports, 1 100M Ethernet port | Vibration | 20~2000Hz,6.06g | ||
| Alignment time | ≤15min | MTBF | >20000 hours | ||